

Zoznam laboratórnych procesov
- Rektifikačná kolóna Armfield UOP3CC
- Vsádzková membránová stanica
- Multifunkčná stanica Armfield PCT40
- Tréningová stanica Armfield PCT23
- Laboratórny experiment DTS200: Tri zásobníky kvapaliny
- Laboratórny výmenník tepla LTR 700
- Guľôčka na ploche
- Magnetická levitácia
- Lego Mindstorms
- Hydraulická sústava uDAQ28/3H
- Tepelno-optická sústava uDAQ28/LT
- Zásobníky kvapaliny
- Elektrický pohon
- Rotačné inverzné kyvadlo Furuta
Rektifikačná kolóna Armfield UOP3CC
Laboratórna stanica Armfield UOP3CC umožňuje budúcim inžinierom vyskúšať si úvodné etapy v procese inžinierstva ako aj návrh i implementáciu moderných regulačných stratégií na Laboratórnom modeli rektifikačnej kolóny. Stanica umožňuje kontinuálnu alebo vsádzkovú prevádzku.
Na procese je možné zapojiť veľké množstvo riadiacich slučiek:
Riadenie môže byť realizované v prostredí:
Hardware:
|
 Obr. UOP3CC: Rektifikačná kolóna Armfield |
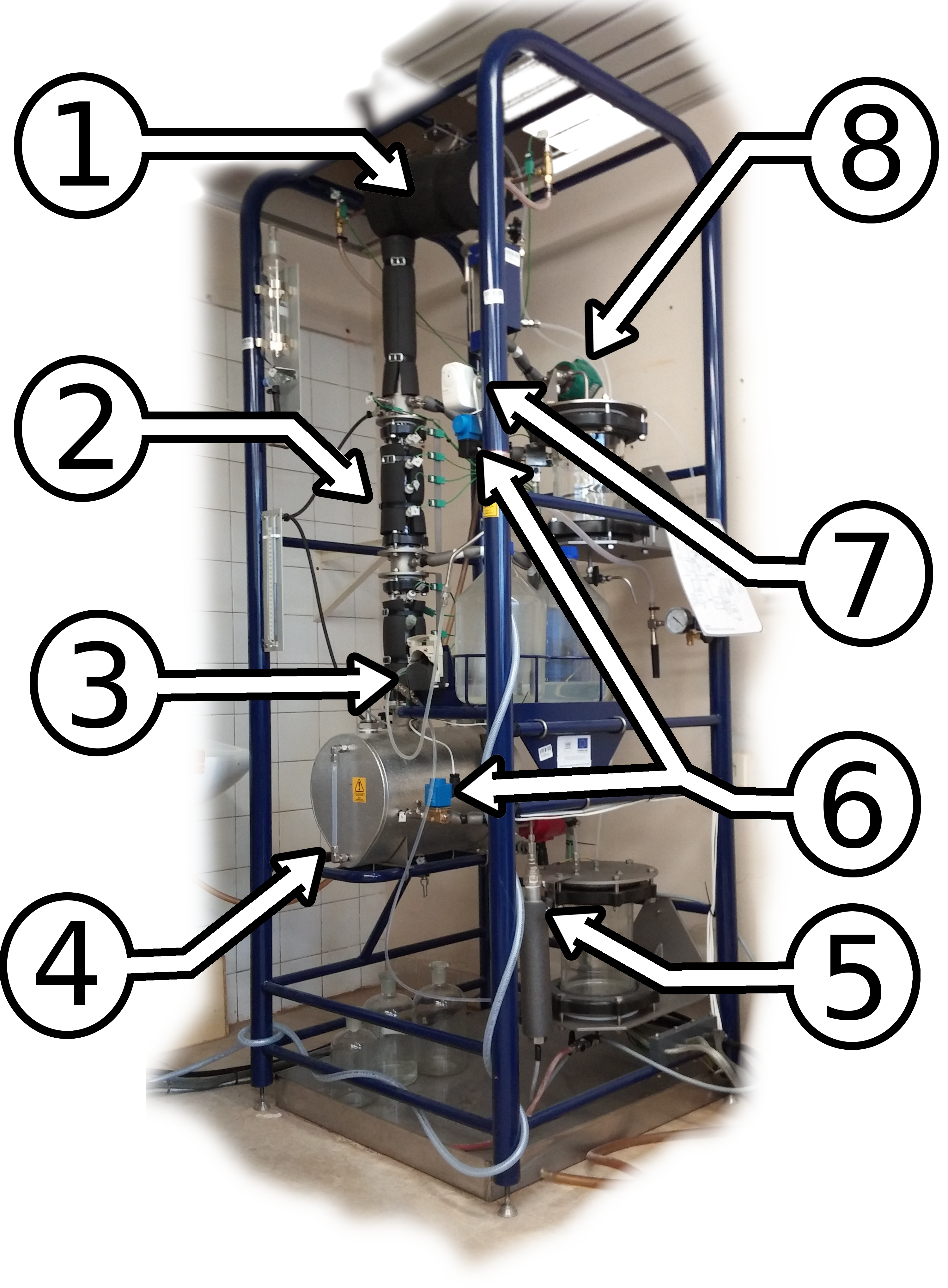
Vsádzková membránová stanica
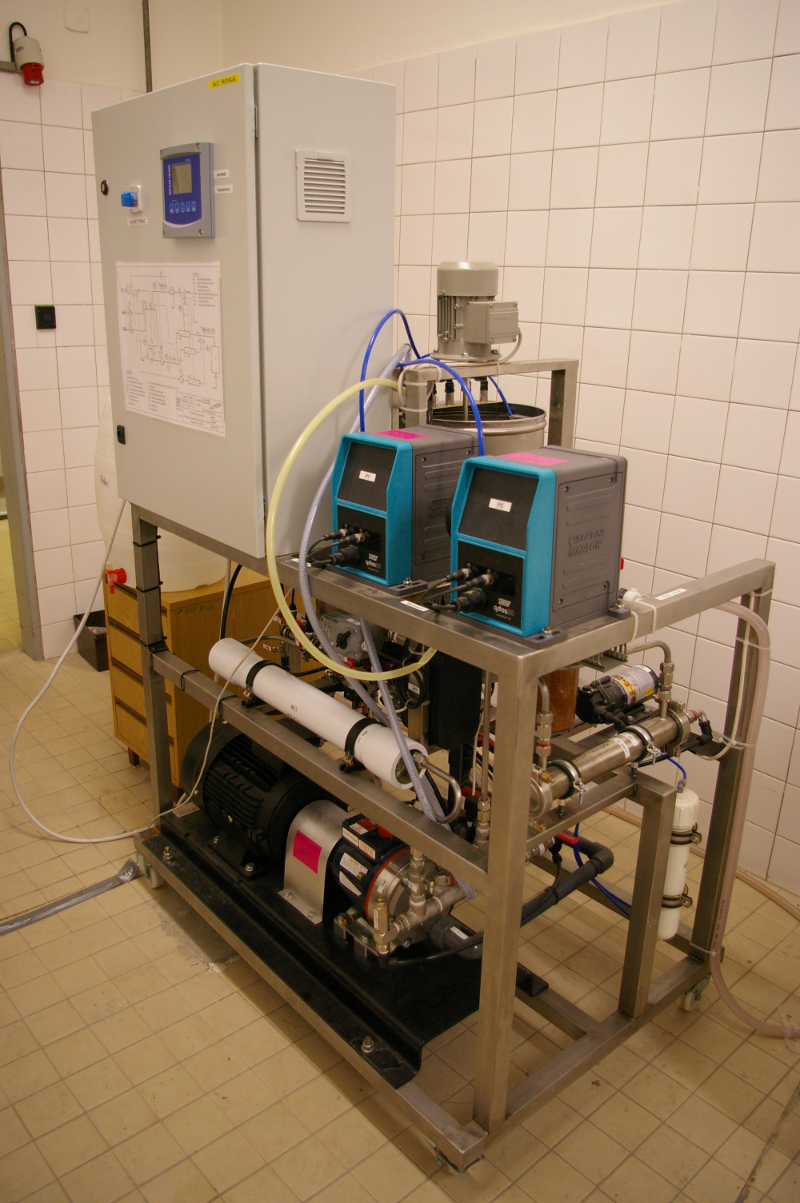
Membránová procesná stanica je navrhnutá na filtráciu a separáciu rôznych kvapalných roztokov pomocou membránovej technológie. Zariadenie slúži na rôzne typy filtrácií ako napríklad nanofiltrácia, ultrafiltrácia a reverzná osmóza, ktoré sú často používané v chemickom a potravinárskom priemysle. Klasické príklady membránovej separácie sú napríklad odsolovanie morskej vody alebo čistenie odpadových vôd. Riadenie systému je riešené pomocou priemyselných riadiacich systémov PLC, SCADA a PC operátorskej stanice ktorá sa používa na návrh riadenia a zber dát z rozličných senzorov (tlak, teplota a vodivosť) pomocou Matlab/Simulink. Riadenie umožňuje testovanie a aplikáciu nových riadiacich algoritmov.
Multifunkčná stanica Armfield PCT40
Multifunkčná stanica Armfield PCT40 je sústava viacerých zariadení. Pozostáva zo základného modulu PCT40 a prídavných modulov PCT41 a PCT42. Základný modul PCT40 (obr. PCT40_1) pozostáva z dvoch chemickotechnologických zariadení ako je zásobník kvapaliny a výmenník tepla. Na základnom module sú tiež umiestnené potrubia, čerpadlá, ventily, senzory a ďalšie elektrické prvky, ktoré slúžia na meranie a reguláciu procesných veličín. Stanica je pripojená na vodovod cez tlakový regulačný ventil s integrovaným filtrom.

Prídavný modul PCT41 predstavuje chemický reaktor, ktorý je umiestnený v ľavej časti základného modulu. Prídavný modul PCT42 je snímač na meranie pH. Všetky tri chemickotechnologické zariadenia môžu byť navzájom poprepájané. Na jednotlivých zariadeniach sa môžu realizovať rôzne typy riadení.
Výmenník tepla

Výmenník tepla (obr. PCT40_2) pozostáva z valcovej nádoby, ktorá je umiestnená v pravej časti základného modulu PCT40. Obsahuje dve špirály, kde jedna slúži na chladenie a druhá na ohrev. Teplota kvapaliny v chladiacej špirále je snímaná na vstupe aj na výstupe. Ďalší snímač teploty sníma teplotu kvapaliny vo vnútri výmenníka tepla. Vo výmenníku sa meria aj výška hladiny kvapaliny. Snímač hladiny zabezpečuje to, že ohrevná špirála sa nezapne dovtedy, kým nebude úplne ponorená. Je tu aj termostat, ktorý slúži na to, že keď teplota kvapaliny vo výmenníku presiahne požadovanú hodnotu ohrev sa vypne. Kvapalinu do výmenníka tepla a do chladiacej špirály sa môže privádzať cez PSV alebo pomocou peristaltického čerpadla. Na čerpanie horúcej kvapaliny slúži čerpadlo (gear pump).
Chemický reaktor
Chemický reaktor (obr. PCT40_3) pozostáva z valcovej nádoby, ktorá je umiestnená v ľavej časti základného modulu PCT40. Ohrev alebo chladenie reaktora je zabezpečené špirálou. Homogénnosť reakčnej zmesi zabezpečuje miešadlo v strede nádoby. Vstupné suroviny sa do reaktora privádzajú cez peristaltické čerpadlá alebo cez PSV. Konštantná výška hladiny reakčnej zmesi v reaktore je zabezpečená prepadovou rúrkou. Teplota látky na vstupe sa môže sledovať pomocou snímača teploty. Koncentrácia produktov sa meria pomocou snímača elektrickej vodivosti. Chemický reaktor má tiež jeden ručný vypúšťací ventil.
Zásobník kvapaliny

Zásobník kvapaliny (obr. PCT40_4) je valcová nádoba z akrylu, ktorá je umiestnená v strede základného modulu PCT40. Vo vnútri zásobníka je umiestnený odmontovateľný valec, ktorý slúži na zväčšenie objemu. Teda samotný zásobník tvorí priestor v medzikruží. Kvapalina sa do zásobníka privádza zhora. Ako kvapalina bola použitá voda, ktorá sa privádzala z vodovodu. Kvapalina do zásobníka môže byť privádzaná cez PSV alebo pomocou peristaltického čerpadla. K dispozícii máme dve peristaltické čerpadlá, ktoré sa nachádzajú na prednej časti základného modulu. Prietok privádzanej vody sa meria prietokomerom F1. Voda zo zásobníka vyteká cez solenoidné ventily SOL2 a SOL3 alebo sa odčerpáva pomocou peristaltického čerpadla. Na vypúšťanie kvapaliny môžeme použiť aj ručný ventil na spodku zásobníka. v zásobníku sa nachádza aj prepadová rúrka, ktorá zabráni pretečeniu zásobníka.
Ovládanie multifunkčnej stanice PCT40
Multifunkčnú stanicu PCT40 je možné ovládať cez USB, I/O kartu alebo pomocou zariadenia PCT43.
Spoločnosť Armfield dodala k stanici kompletný vzdelávací softvér, cez ktorý môžeme komunikovať so stanicou. Ak na riadenie stanice PCT40 chceme použiť tento softvér, tak potrebujeme počítač. Počítač komunikuje s multifunkčnou stanicou cez USB rozhranie. Softvér obsahuje schémy chemickotechnologických procesov, umožňuje vykresľovať a uchovávať hodnoty vstupných a výstupných údajov. Ďalej umožňuje riadiť procesy s dvojpolohovými, spojitými regulátormi, a rozvetvenými regulačnými obvodmi. Vstupy do jednotlivých chemickotechnologických procesov môžeme nastaviť aj manuálne. K softvéru je dokumentácia, ktorá obsahuje niekoľko úloh pre študentov na laboratórne cvičenia.

Zariadenie PCT43 (obr. PCT43_1) sa používa na riadenie multifunkčnej stanice PCT40 bez pripojenia počítača. Obsahuje ovládacie prvky pre čerpadlá, ventily a ohrev a PID regulátor. Procesné veličiny merané pomocou snímačov sú zobrazované na displeji v pravej časti zariadenia. Na riadenie procesných veličín sa môžu použiť PSV, peristaltické čerpadlá a čerpadlo pre horúcu kvapalinu, ktoré môžu byť nastavené manuálne alebo PID regulátorom. Základný a prídavné moduly sú prepojené so zariadením PCT43 cez technologickú kartu.
S multifunkčnou stanicou sa dá komunikovať aj cez softvér MATLAB. Na ovládanie multifunkčnej stanice sa používa Simulink a MATLAB Real-time Toolbox. Simulinková schéma komunikuje so stanicou cez multifunkčnú I/O kartu MF624 od firmy Humusoft.
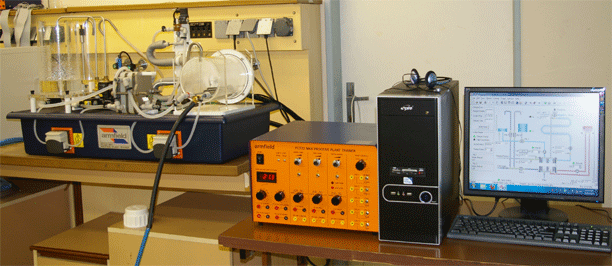
Tréningová stanica Armfield PCT23
Tréningová stanica Armfield môže byť použitá na demonštráciu množiny metód a stratégií riadenia procesov.
Laboratórny experiment DTS200: Tri zásobníky kvapaliny
Proces zobrazený na obr. DTS200_1 pozostáva z troch rovnakých valcových zásobníkov kvapaliny spojených potrubím s ventilmi. Voda poháňaná dvomi čerpadlami cirkuluje v uzavretej slučke. Viac údajov nájdete na stránke výrobcu.

Laboratórny výmenník tepla LTR 700
Laboratórny výmenník LTR 700 (obr. LTR700_1) je schopný zabezpečiť vzduch pri želanom prietoku a teplote v rozsahu 25 až 75°C. Skladá sa z trubice, ktorá obsahuje ohrevnú špirálu a ventilátor a zo skrinky so zdrojom.
Výmenník tepla má dva merateľné výstupné signály (teplota, prietok vzduchu) ako aj dva vstupné signály (otáčky ventilátora, ohrev).
Je možné realizovať rozličné riadiace obvody:
- Jednoduché riadiace obvody:
- riadenie prietoku vzduchu pri neriadenej teplote
- riadenie teploty pomocou ohrevu pri neregulovanom prietoku vzduchu
- riadenie teploty pomocou otáčok ventilátora pri neregulovanom ohreve
- Kaskádové riadiace obvody:
- riadenie teploty ako primárnej riadenej veličiny a prietoku ako sekundárnej riadenej veličiny pomocou manipulácie s ohrevom
- riadenie teploty ako primárnej riadenej veličiny a prietoku ako sekundárnej riadenej veličiny pomocou manipulácie s otáčkami ventilátora.
Riadenie výmenníka je realizované prostredníctvom počítača s kartou dSPACE 1102 obsahujúcou DSP procesor firmy Texas Instruments. Programovanie prebieha v Simulinku, výsledná schéma je automaticky prekompilovaná na DSP procesor. Vizualizácia je programovaná pomocou softvéru Control Desk (dSPACE).
Guľôčka na ploche

Laboratórny model (obr. CE151) je dvojrozmerový systém vytvorený pre experimentovanie s nestabilnými dynamickými systémami s využitím rôznych algoritmov riadenia. Tento dynamický model s dvomi vstupmi a dvomi výstupmi môže riadiť obidve súradnice guľôčky nezávisle na ich vzájomnej interakcii.
Systém obsahuje naklápajúcu sa dosku. Ta môže byť zo stredu naklápaná dvoma smermi. Servo systém sa skladá z riadiacej karty motora a dvoch krokových motorčekov umiestnených pod doskou. Snímací systém obsahuje CCD kameru a slúži na zistenie aktuálnej pozície guľôčky.
Magnetická levitácia

Laboratórny model (obr. CE152) je jednorozmerný systém s jedným vstupom a jedným výstupom. Je to silne nelineárny dynamický systém. Slúži pre experimentovanie s rôznymi algoritmami riadenia.
Model je pripojený k PC vstupno-výstupnou meracou kartou MF614 (štandardná meracia karta s ôsmymi 12 bitovými A/D prevodníkmi, 8 digitálnymi TTL vstupmi (výstupmi). Dva kanály sú použité pre meranie pozície guľôčky a prúdu cievky. Na riadenie výkonového zosilňovača je využitý jeden analógový výstup.
Guľôčka levituje v magnetickom poli cievky. Na meranie jej pozície je použitý magnetický snímač polohy. Prúd do cievky je zosilnený vonkajším zosilňovačom a je priamo úmerný vstupnému elektrickému napätiu.
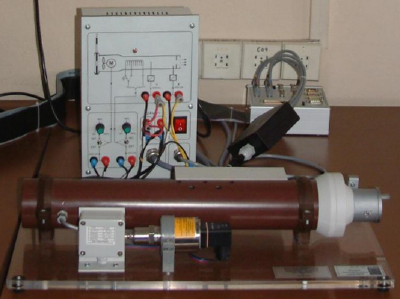
Hydraulická sústava uDAQ28/3H
 |
 |
| Obr. uDAQ28_3H_1: Hydraulická sústava uDAQ28/3H |
Obr. uDAQ28_3H_2: Hydraulická sústava uDAQ28/3H |
Systém umožňuje ovládať riadiacimi napätiami dve čerpadlá a päť ventilov, čo možno využiť na vytvorenie širokej škály úloh identifikácie a riadenia a ich jednoduchú rekonfiguráciu aj pomocou vzdialeného prístupu cez Internet.
Na výstupe je možné merať výšky hladín vodných stĺpcov pomocou troch snímačov tlaku umiestnených pri dne jednotlivých nádob a tiež získavať filtrované hodnoty priebehov týchto veličín.
Merací a komunikačný systém uDAQ28/3H využíva na prenos a spracovanie dát vlastný mikroprocesor. Z hľadiska užívateľa je oproti doterajším riešeniam revolučná zmena v možnosti komunikácie cez USB rozhranie, čo umožňuje pripojenie k ľubovoľnému počítaču bez potreby kúpy a inštalácie špeciálnych vstupno-výstupných kariet. Na napájanie bezpečným napätím 12V a 24V slúžia malé adaptéry (podobné nabíjačke mobilných telefónov).
Zdroj informácie: Školská hydraulická sústava uDAQ28/3H
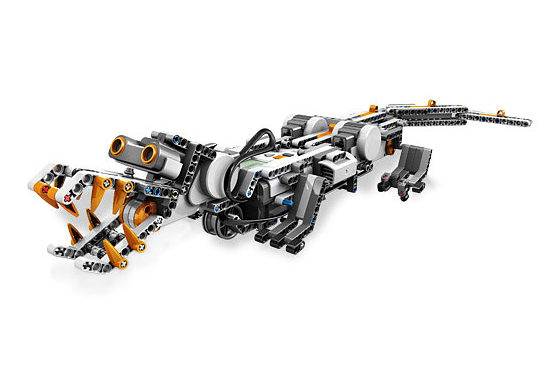
Lego Mindstorms
LEGO Mindstorms je sada programovateľných robotických stavebníc vyrábaných firmou Lego.
Stavebnica Mindstorms verzie NXT má tri servomotory a po jednom senzore dotyku, svetla, zvuku a vzdialenosti. Z Lego Mindstorms môže byť zostavený model systému s počítačom kontrolovanými elektromechanickými časťami.





Tepelno-optická sústava uDAQ28/LT
 |
 |
| Obr. uDAQ28_LT_1: Tepelno-optická sústava uDAQ28/LT |
Obr. uDAQ28_LT_2: Tepelno-optická sústava uDAQ28/LT |
Systém disponuje tromi vstupnými veličinami – napätím žiarovky, ktorá reprezentuje vyhrievacie a svetelné teleso zároveň, napätím ventilátora (slúži na ochladzovanie teploty v systéme) a napätím svetelnej diódy, ktorá je druhým možným zdrojom svetla optického kanálu. Tiež je možné nastavovať periódu vzorkovania a časové konštanty vstavaných derivačných filtrov.
Na výstupe je možné merať 7 veličín: teplotu vo vyhrievanom priestore (priamo alebo po predbežnej filtrácii), referenčnú teplotu okolia, intenzitu osvetlenia (priamo alebo po predbežnej filtrácii), rýchlosť otáčok a prúd motorčeka ventilátora.
Merací a komunikačný systém uDAQ28/LT využíva na prenos a spracovanie dát vlastný mikroprocesor. Z hľadiska užívateľa je oproti doterajším riešeniam revolučná zmena v možnosti komunikácie cez USB rozhranie, čo umožňuje pripojenie k ľubovoľnému počítaču bez potreby kúpy a inštalácie špeciálnych vstupno-výstupných kariet. Na napájanie bezpečným napätím 12V slúži malý adaptér (podobný nabíjačke mobilných telefónov).
Zdroj informácie: Školská tepelno-optická sústava uDAQ28/LT
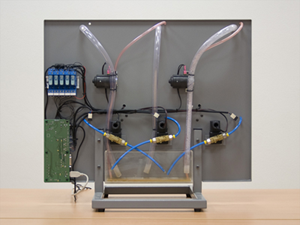
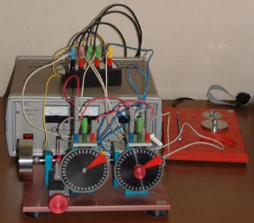
Zásobníky kvapaliny
Základom zariadenia sú dve dvojice nad sebou umiestnených hydraulických nádrží, vo vertikálnej rovine spojené vzdušníkom. Nádoby sú rovnako vysoké, vnútorný prierez nádob na pravej strane je menší. V obidvoch vetvách je voda zo spodnej zásobnej nádrže čerpaná do hornej nádoby a clonkou na jej dne preteká do druhej nádoby pod ňou. Odtiaľ voda vyteká clonkou späť do spodnej zásobnej nádrže.

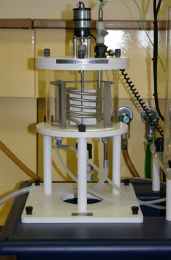
Elektrický pohon
Servopohon (obr. servo) umožňuje snímanie štyroch veličín: napätie, rýchlosť, poloha, žiadaná poloha. Riadiacou veličinou je vstupujúce napätie. Zo systémového hľadiska sa dá servopohon charakterizovať ako systém obsahujúci integrátor a to znamená, že je systém na hranici stability. Objavuje sa tu jav hysterézie, spojený z odporom prostredia pri štarte servopohonu. Odozvy jednotlivých veličín na zmeny vstupného napätia sú rýchle, obsluha servopohonu je jednoduchá a bezpečná. K pripojeniu servopohonu sú potrebné ešte prúdový zosilňovač, prevodník signálov a PC, na ktorom bude užívateľ ovládať servopohon.
Pohon je v súčasnosti riadený pomocou systému dSPACE podobne ako laboratórny výmenník tepla LTR 700.
Rotačné inverzné kyvadlo Furuta
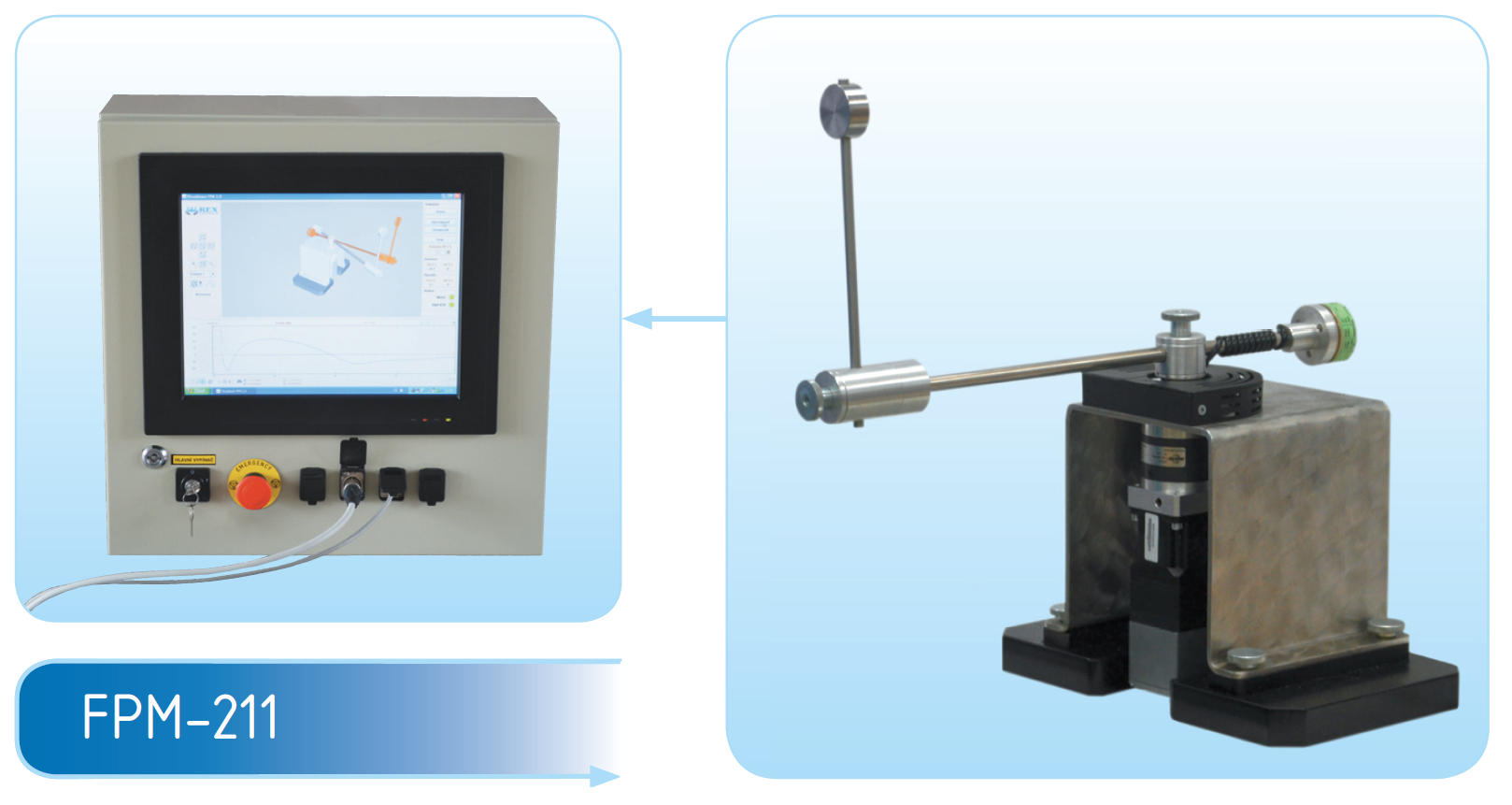
Rotačné inverzné kyvadlo FPM-211, v angličtine označované ako "Furuta pendulum", je inverzné kyvadlo ovládané ramenom, ktoré sa otáča vo vodorovnej rovine. Systém je charakterizovaný štyrmi stavmi, ktorými sú uhol náklonu kyvadla, uhlová rýchlosť kyvadla, uhol otočenia vodorovného ramena a uhlová rýchlosť ramena. Riadiacou veličinou je uhlové zrýchlenie tohoto vodorovného ramena. Tento model je charakteristický svojou rýchlou dynamikou a nelinearitou. Úlohou riadenia je stabilizovať kyvadlo v jeho hornej alebo dolnej zvislej pozícii, príp. vyšvihnutie z dolnej do hornej pozície - tzv. Swing Up. Aplikovať riadiace algoritmy na systém je možné priamo v prostredí REX a to buď návrhom vhodnej blokovej schémy alebo implementáciou skriptu v jazyku C. Prostredie REX je svojou vizuálnou stránkou podobné prostrediu MATLAB SIMULINK.

Ústav informatizácie, automatizácie a matematiky vznikol 1.1.2006 spojením Katedry informatizácie a riadenia procesov a Katedry matematiky.
Najnovšie príspevky
- IAM na ESCAPE 3629.6.2026 13:38
- ChemShow 202629.6.2026 10:06
- Obhajoby bakalárskych prác22.6.2026 17:03
Kontakt
Radlinského 9
812 37 Bratislava
Tel.: +421 259 325 366
Fax: +421 259 325 340
Mobil: +421 918 674 366
e-mail: office@uiam.sk
6. poschodie, Blok C NB
2026 © All Rights Reserved. UIAM FCHPT STU | webmaster@uiam.sk